Projects
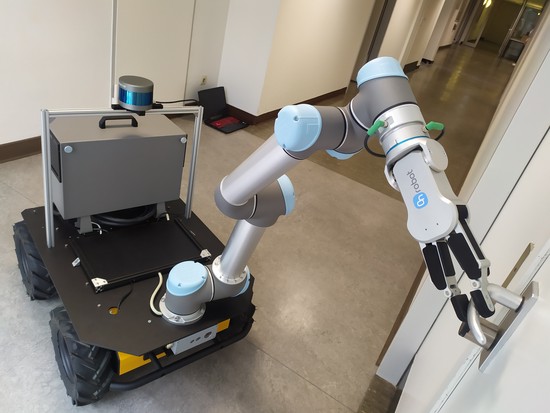
RoLand
Robotik in der Landwirtschaft

SmartRecycling-UP
KI und Robotik für eine nachhaltige Kreislaufwirtschaft

Machine Learning and Embedded ML
unsupervised and supervised learning, neural networks, reinforcement learning, embedded machine learning

Test Area Intelligent Quartier Mobility (TIQ)
Urban mobility of tomorrow*:* safe, available and climate-friendly. Pedestrian Zone Test Area Berliner Tor

AuTag BeoFisch
Autonome Tauchroboter-gestützte Beobachtung von Fischschwärmen
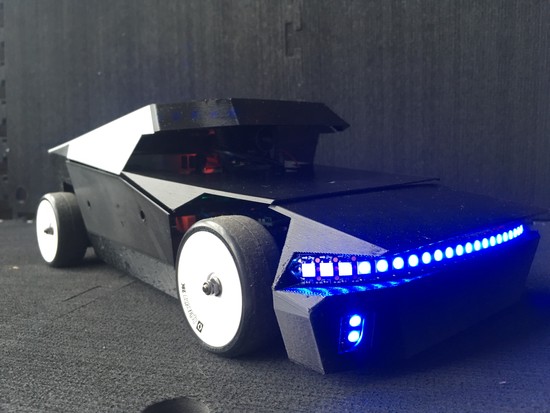
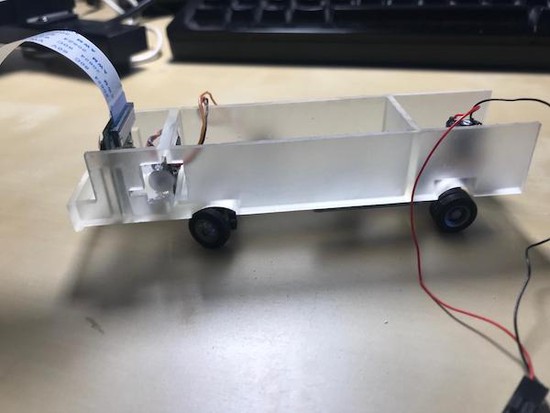
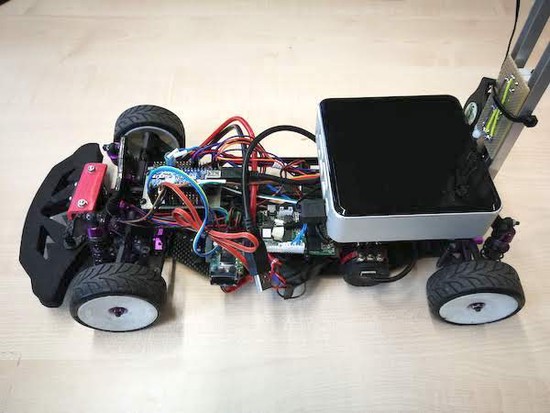
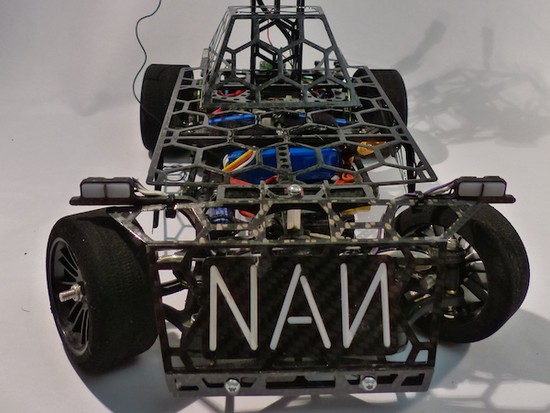
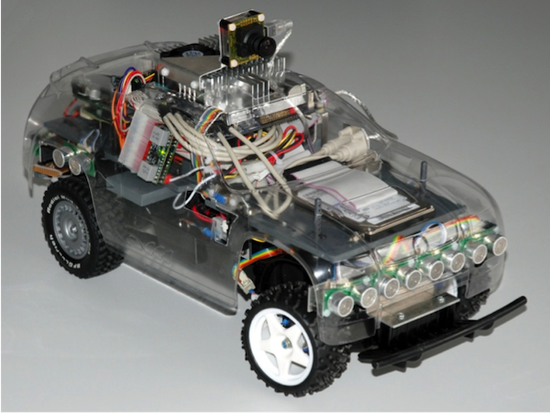
Carolo Cup
Student Competition at TU Braunschweig on Construction of Autonomous Model Cars
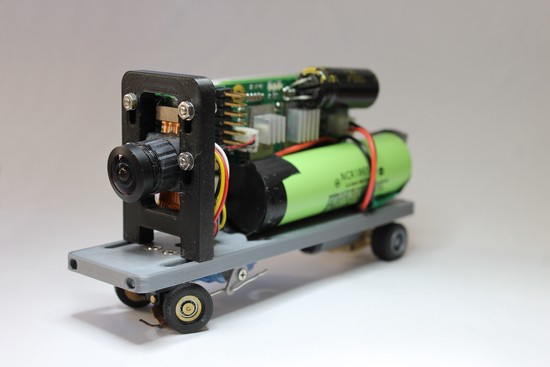
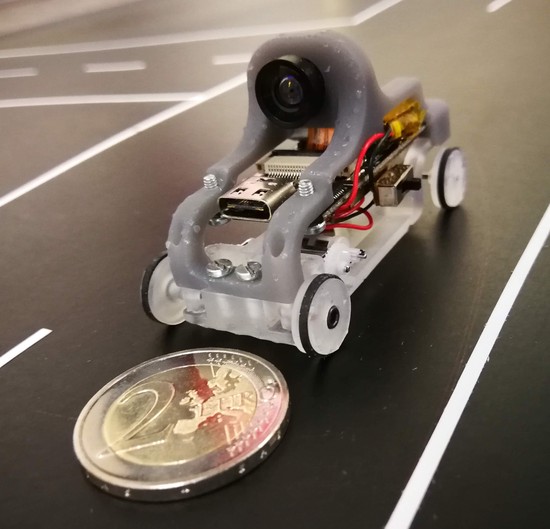
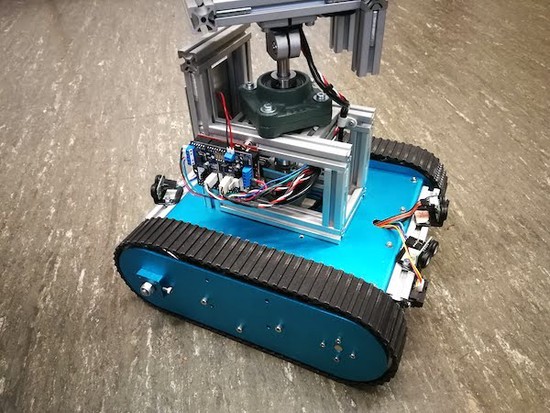
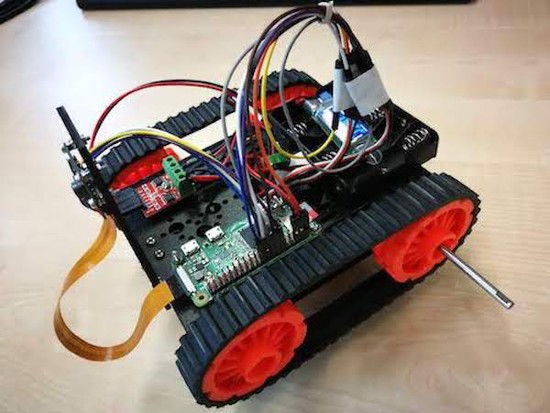
Miniatur autonomous systems
Development of autonomous systems of small size (scale 1:87) for testing, machine learning and multi-agent algorithms

Reactive Systems Programming
Code samples in C++